韩国电子通信研究院(ETRI)的研究人员最近开发了一种基于深度学习的模型,可以帮助机器人产生更深入的非语言社交行为,例如拥抱或握手。在arXiv上预发表的一篇论文中,他们的模型可以通过观察人类之间的互动,积极学习新的适合情境的社会行为。
“深度学习技术在计算机视觉和自然语言理解等领域产生了有趣的结果,”进行这项研究之一的研究人员Woo-Ri Ko告诉媒体。他们将深度学习应用于社交机器人,这种方法不需要人类行为模型的先验知识。只是通过机器人自己从人与人的互动中学习社交行为。
Ko及其同事开发的基于人工神经网络(ANN)的架构将谷歌在2014年推出的Seq2Seq模型与生成对抗网络(GAN)相结合。新架构在AIR-Act2Act数据集上进行了训练,该数据集包含10种不同场景及5000次人机交互。其中人类在与其他人互动时执行特定的非语言社交行为。
研究人员专门训练模型为机器人生成五种非语言行为,即鞠躬、凝视、握手、拥抱和挡住自己的脸。
“拟议的神经网络架构由编码器、解码器和鉴别器组成”,Ko 解释道。“编码器对当前用户行为进行编码,解码器根据当前用户和机器人行为生成下一个机器人行为,鉴别器防止解码器在生成长期行为时输出无效的姿势序列。”
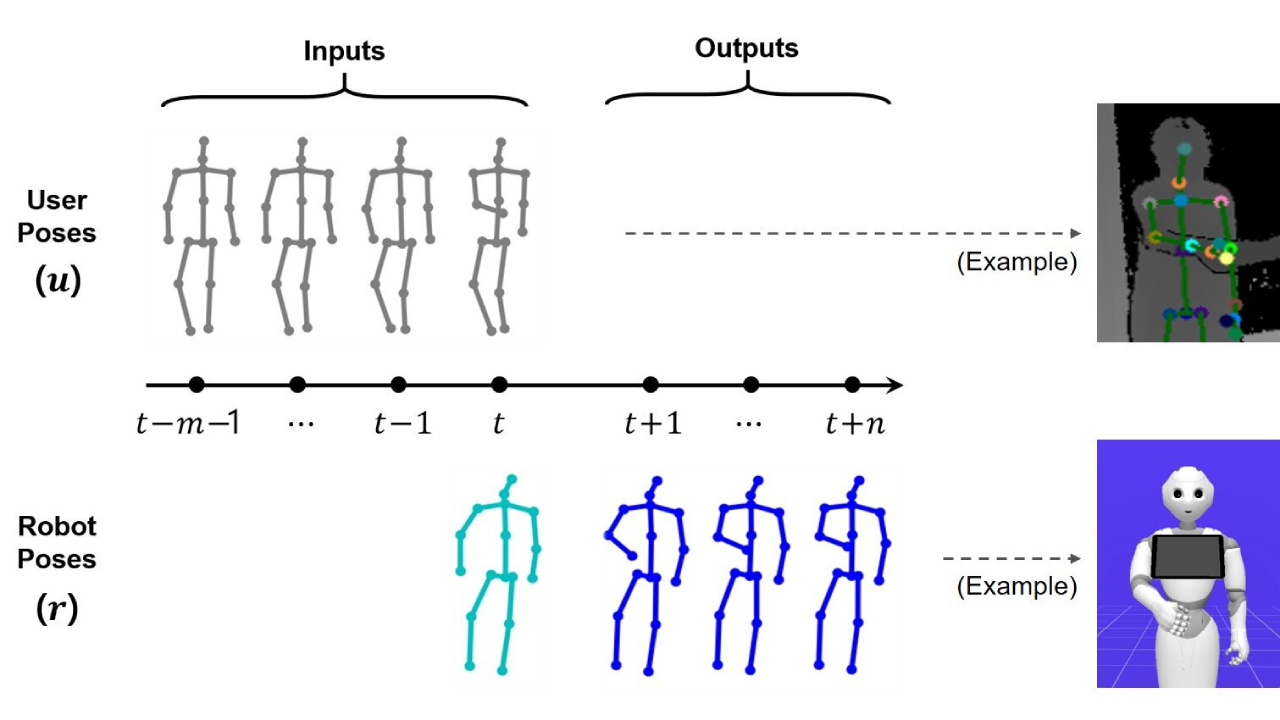
机器人社交行为的生成涉及分配下一个机器人行为,以响应当前用户行为,同时保持与当前机器人行为的连续性。
相关资料
文章来源:https://techxplore.com/news/2022-11-deep-generates-nonverbal-social-behavior.html
arXiv论文:https://arxiv.org/abs/2211.00930


