

调侃声中,乐山市住建局的工作人员澄清:所谓“磨洋工”,实则是高精度边坡修整,属于“慢工出细活”的专业操作。该项目位于23米高的疏松土坡上,下方是繁忙车道,每一铲的深浅和角度都关乎下方车辆行人的安全。此外,干活的师傅表示听网友们调侃自己磨洋工“很伤心”,因为自己不仅冒着危险在施工,还要考虑下方道路的安全。
转载自:"网易灵动"2025-06-27 15:18:50

自动装车

自动导航

自动挖沟

点哪挖哪
 电脑
电脑 座舱
座舱 AR眼镜
AR眼镜















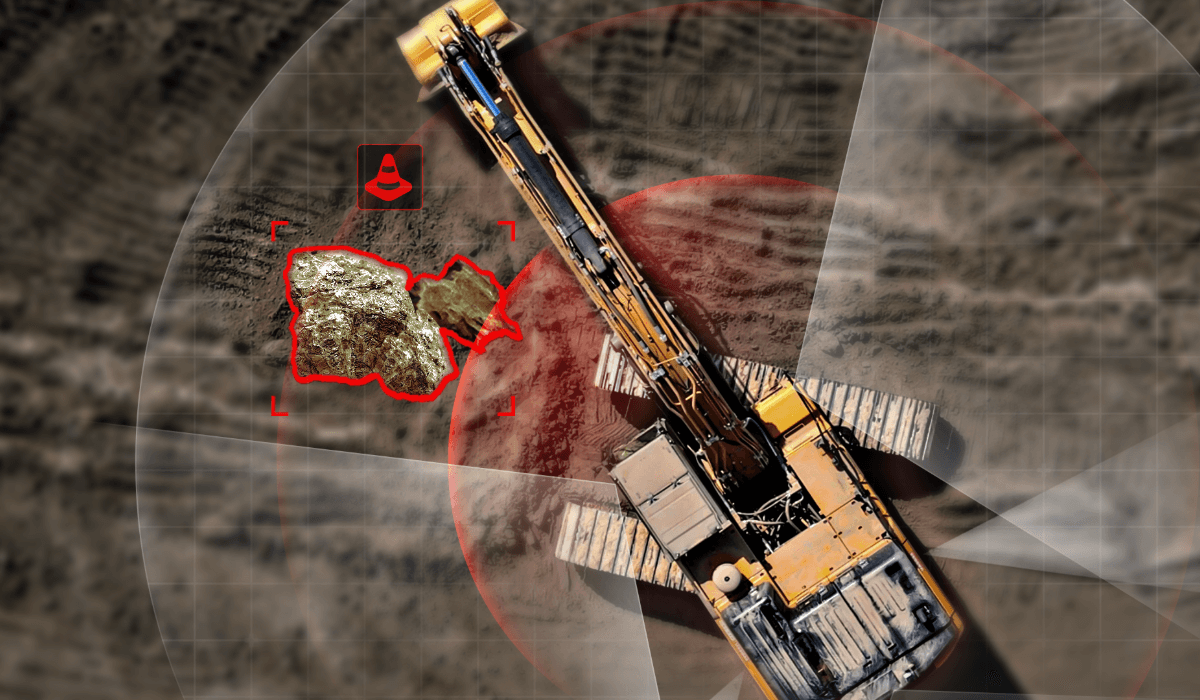
持续感知周围环境并检测安全范围,及时反馈碰撞风险
 模拟座舱
模拟座舱 手柄/鼠标
手柄/鼠标 紧急制动
紧急制动 高清大屏
高清大屏 故障上报
故障上报 心跳监测
心跳监测 障碍物检测
障碍物检测 360环视
360环视 2D挖斗落点
2D挖斗落点 倾覆预警
倾覆预警 辅助视角
辅助视角 挖机姿态
挖机姿态 末端控制
末端控制 点哪挖哪
点哪挖哪 一键刷坡
一键刷坡 一键平地
一键平地 单斗甩方
单斗甩方 位姿记录
位姿记录 AR 增强
AR 增强 空间视场
空间视场 斗齿检测
斗齿检测 孪生实时重建
孪生实时重建 行人检测
行人检测 粉尘透视
粉尘透视 区域自动装车
区域自动装车 自动甩方
自动甩方 循迹导航
循迹导航 场景建模
场景建模 地图融合
地图融合 监管调度
监管调度









