首页
产品
网易灵动
智慧矿山挖掘机器人
搅拌站无人装载机器人
港口清舱装载机器人
网易机器人
智能理疗机器人 R1
有灵天工
营销宣传设计
游戏美术生产
影视动画制作
有灵众包
众包数据服务
有灵智能体
AOP面向智能体编程
AI智能体
妙启AI智能对话
解决方案
装载机解决方案
挖掘机解决方案
数据标注解决方案
资料库
客户案例
技术文档
常见问题
标签库
伏羲实验室
竞赛活动
高校合作
关于我们
伏羲介绍
人才招聘
联系我们
港口清舱 装载机器人
基于面向智能体编程(AOP)的理论指导及自研工业大模型,采用先进的传感器技术和人工智能算法,能够精准识别货物类型和位置,实现自动化清舱和装载作业。实现在港口场景下的数智化作业,引领港口自动化新纪元。
免费咨询
核心技术助力实时生产
Play Video
Playback Rate
1.00x
Play
Current Time
0:00
/
Duration Time
0:00
Progress: NaN%
Non-Fullscreen
粉尘透视
通过先进的图像处理技术,能够直接去除船舱图像的扬尘造成影响,提供清晰视野
驾驶辅助
前后视角实时显示转弯辅助线,辅助驾驶更安心
3D实时姿态
利用装载机建模实时展示铲斗姿态,并在装载机周围显示障碍物预警
全息数字孪生
对作业环境构建实时3D数字孪生场景,精确管控与预测作业进度
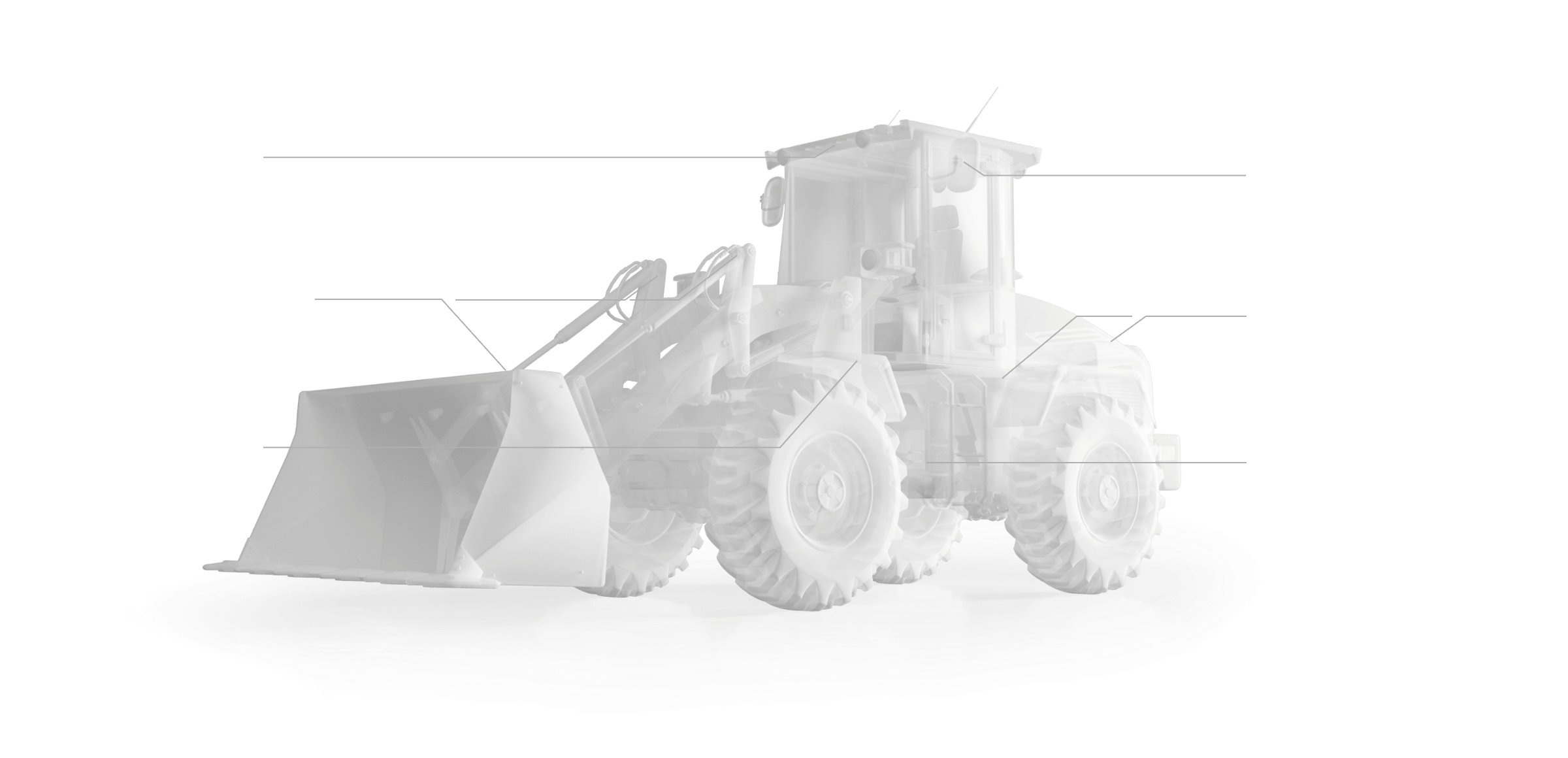
多传感器融合AI算法,实现高精度控制
硬件配置
imu&角度传感器
测量关节角度
多视角相机
传输高清作业画面
多路电磁阀
控制液压
计算单元与控制单元
实现端侧决策与控制
压力传感器
力反馈
毫米波雷达
检测四周障碍物
算法配置
场景感知模型
实现多传感器融合AI算法,实现高精度建图、定位和路径规划,定位精度优于5cm,导航误差低于10cm。
运动控制模型
建立装载机动力学关节模型,针对港口船舱环境,动态规划实现车辆运动高精度控制,车辆控制精度优于30cm。
安全防护保障
实现装载机全域10m内障碍物识别检测、车身倾斜告警,接入多端手动接管能力,全面保障作业安全。
自动清舱,释放双手,高效作业
Play Video
Play
Current Time
0:00
/
Duration Time
0:00
Progress: NaN%
Non-Fullscreen
智能防护,守护人机安全
障碍物检测
全域行人检测
车体倾斜检测
持续感知周围环境并检测安全范围,及时反馈碰撞风险
多种远控终端,各具优点的组合方案
电脑
一台电脑即可完成装载机的远程操控支持键鼠、飞控手柄、游戏手柄WIFI/5G网络下也可远控
座舱
超清显示画面,复刻装载机驾驶体验 可适配不同型号装载机, 支持定制物理按键
AR智能眼镜
3D概览眼镜,与真实现场无感融合 提供隐式交互体验,更便携的控制助手,外观简洁,符合多种佩戴场景
方案架构
新闻资讯
当网红挖机因“磨洋工”上热搜,这个工程机器人在“黑灯工地”里24小时不眠不休
调侃声中,乐山市住建局的工作人员澄清:所谓“磨洋工”,实则是高精度边坡修整,属于“慢工出细活”的专业操作。该项目位于23米高的疏松土坡上,下方是繁忙车道,每一铲的深浅和角度都关乎下方车辆行人的安全。此外,干活的师傅表示听网友们调侃自己磨洋工“很伤心”,因为自己不仅冒着危险在施工,还要考虑下方道路的安全。
转载自:"网易灵动"
2025-06-27 15:18:50
合作伙伴
在线客服
合作咨询
生态合作
扫码进群
免费体验AI服务